脳卒中の患者においては、廃用症候群を予防するために、充分なリスク管理の下に、急性期から少しでも早く離床および歩行訓練させることが必要である。また、初期の歩行訓練から、踵接地時に膝を伸展させ、遊脚期に十分膝を屈曲し、立脚期に膝折れなく安全に正常歩行させることがもとめられている。長下肢装具で従来のように膝を伸展ロックしたままの歩行訓練を避けることで、膝を軽度 屈曲こわばり歩行、ぶん回し歩行などの異常歩行を回避することができると考える。前回我々は、正常歩行パターンを繰り返すように、昨年より外骨格型のロボットアシスト装具を製作した。剛性の高いカーボン製片側支柱の膝装具にラジコン飛行機用のサーボモータを取り付けて、膝の伸展をアシストするようにしたが、以下の問題点があった。
① ベルトクラッチを用いたが 、立脚期に膝折れ防止のトルクが足りず、場合により膝折れした。
② 搖動モーターであり、ベルトが滑ると位相がずれ、完全伸展ができなくなることがあった。
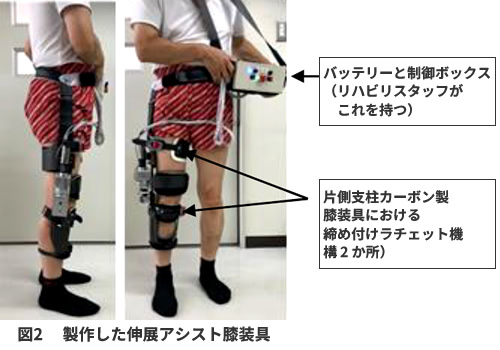
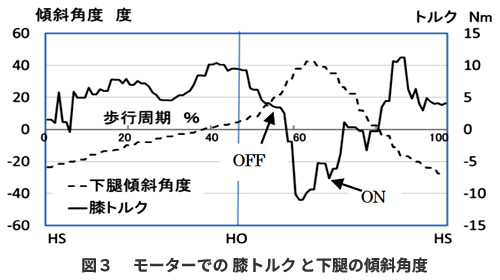
そこで今回は、16000rpmで回る マキソンモーターと電磁クラッチおよび減速ギアを用い、またバッテリーも前回 7.4V から 24V に変更し、パワーアップした。センサーは角度センサー(加速度センサー)と速度センサーを使い、アシストONとOFF(フリー)のタイミングをそれぞれ決定した。膝折れ防止は重要で、ワンウエイクラッチにより確実に止めるようにした。装具も改良し、ラチェット機構の固定ベルトにより、膝部をしっかりと装具と固定し、装具の角度と膝の角度に位相差が生じないようにした。